-
 Orange Pi 6
Khoảng giá: từ 9.500.000VND đến 13.000.000VND
Orange Pi 6
Khoảng giá: từ 9.500.000VND đến 13.000.000VND -
 Arduino Mega 2560 Pro (Embed)
260.000VND
Arduino Mega 2560 Pro (Embed)
260.000VND -
 Arduino MEGA 2560 R3 CH340
380.000VND
Arduino MEGA 2560 R3 CH340
380.000VND -
 Arduino Nano V3.0 ATmega328P
Giá gốc là: 165.000VND.125.000VNDGiá hiện tại là: 125.000VND.
Arduino Nano V3.0 ATmega328P
Giá gốc là: 165.000VND.125.000VNDGiá hiện tại là: 125.000VND. -
 Arduino UNO R3 SMD chip dán
Giá gốc là: 150.000VND.125.000VNDGiá hiện tại là: 125.000VND.
Arduino UNO R3 SMD chip dán
Giá gốc là: 150.000VND.125.000VNDGiá hiện tại là: 125.000VND.
Giảm giá!
")
")


Servo MG90S (Bánh răng kim loại)
Giá gốc là: 95.000VND.60.000VNDGiá hiện tại là: 60.000VND.
Động cơ RC Servo MG90S. Điện áp hoạt động: 4.8 ~ 6VDC. Bánh răng: Kim loại. Kích thước: 22.8 x 12.2 x 28.5mm
DỊCH VỤ & KHUYẾN MÃI LIÊN QUAN
TP.Đà Nẵng(cũ): Miễn phí vận chuyển từ 999k
Tỉnh thành khác: Miễn phí vận chuyển từ 1789k
Bảo Hành: 12 Tháng(Nếu có)
Được hỗ trợ cài đặt cơ bản miễn phí
Động cơ Servo MG90S bánh răng kim loại là phiên bản nâng cấp của động cơ RC Servo 9G với các bánh răng được làm bằng kim loại cho lực khéo khỏe và độ bền cao, động cơ có kích thước nhỏ gọn, cách điều khiển giống như các động cơ RC Servo phổ biến trên thị trường hiện nay: MG996, MG995, 9G,… Phù hợp cho nhiều ứng dụng khác nhau: Robot cánh tay máy, robot nhện, cơ cấu chuyển hướng, cơ cấu quay góc,…
THÔNG SỐ SERVO MG90S
- Model: MG90S servo
- Điện áp hoạt động: 4.8 ~ 6VDC
- Stall Torque: 1.8kg/cm(4.8V), 2.2kg/cm(6V)
- Operating Speed: 0.1sec/60degree(4.8V), 0.08sec/60degree(6V)
- Bánh răng: Kim loại.
- Độ dài dây nối: 175mm
- Trọng lượng: about 13.4g
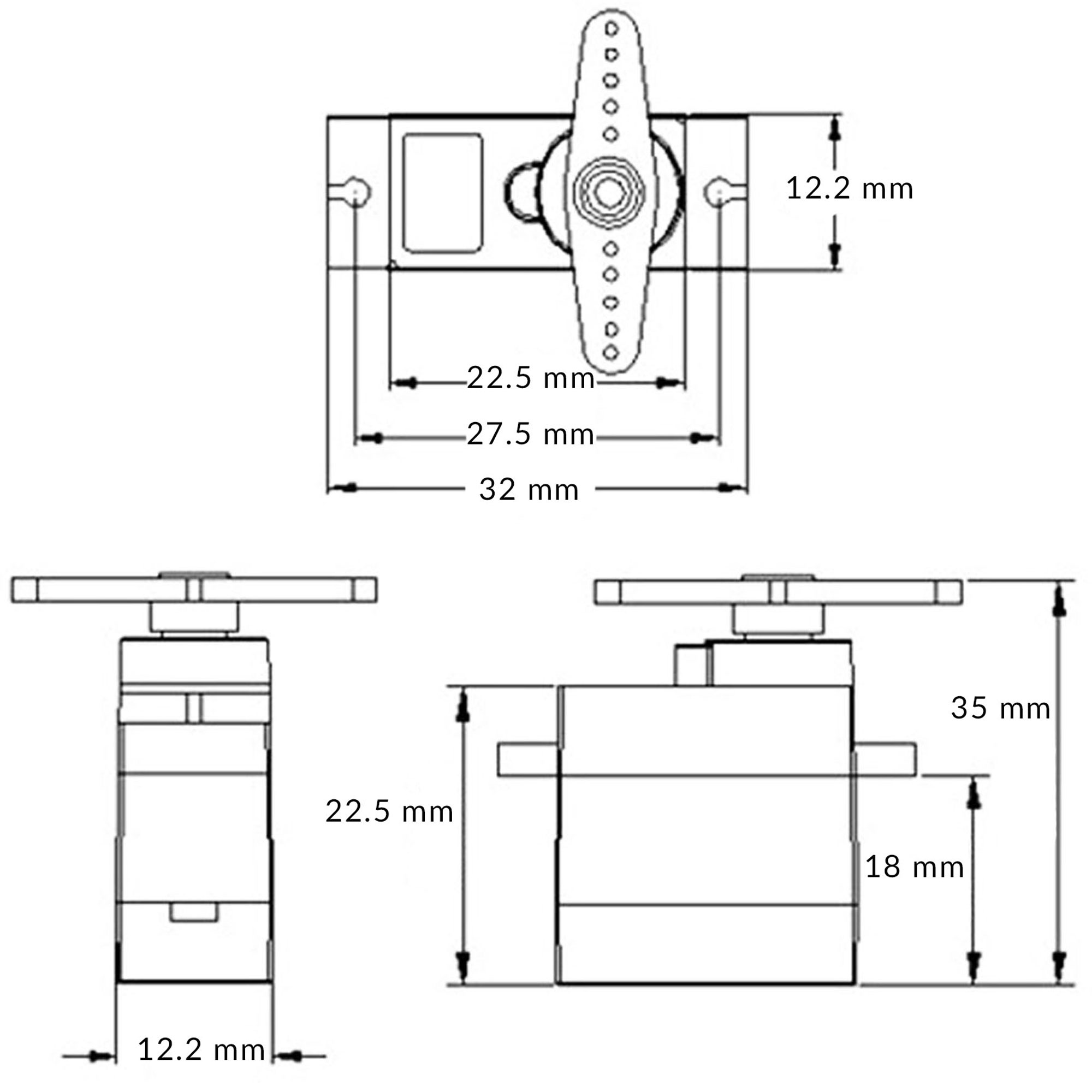
- Kích thước: 22.8 x 12.2 x 28.5mm
Phương pháp điều khiển PWM:
- Độ rộng xung 0.5ms ~ 2.5ms tương ứng 0-180 độ
- Tần số 50Hz, chu kỳ 20ms
Sơ đồ dây:
- Đỏ: Dương nguồn
- Nâu: Âm nguồn
- Cam: Tín hiệu
Kích thước Servo MG90S (Bánh răng kim loại)
Kết nối với arduino:
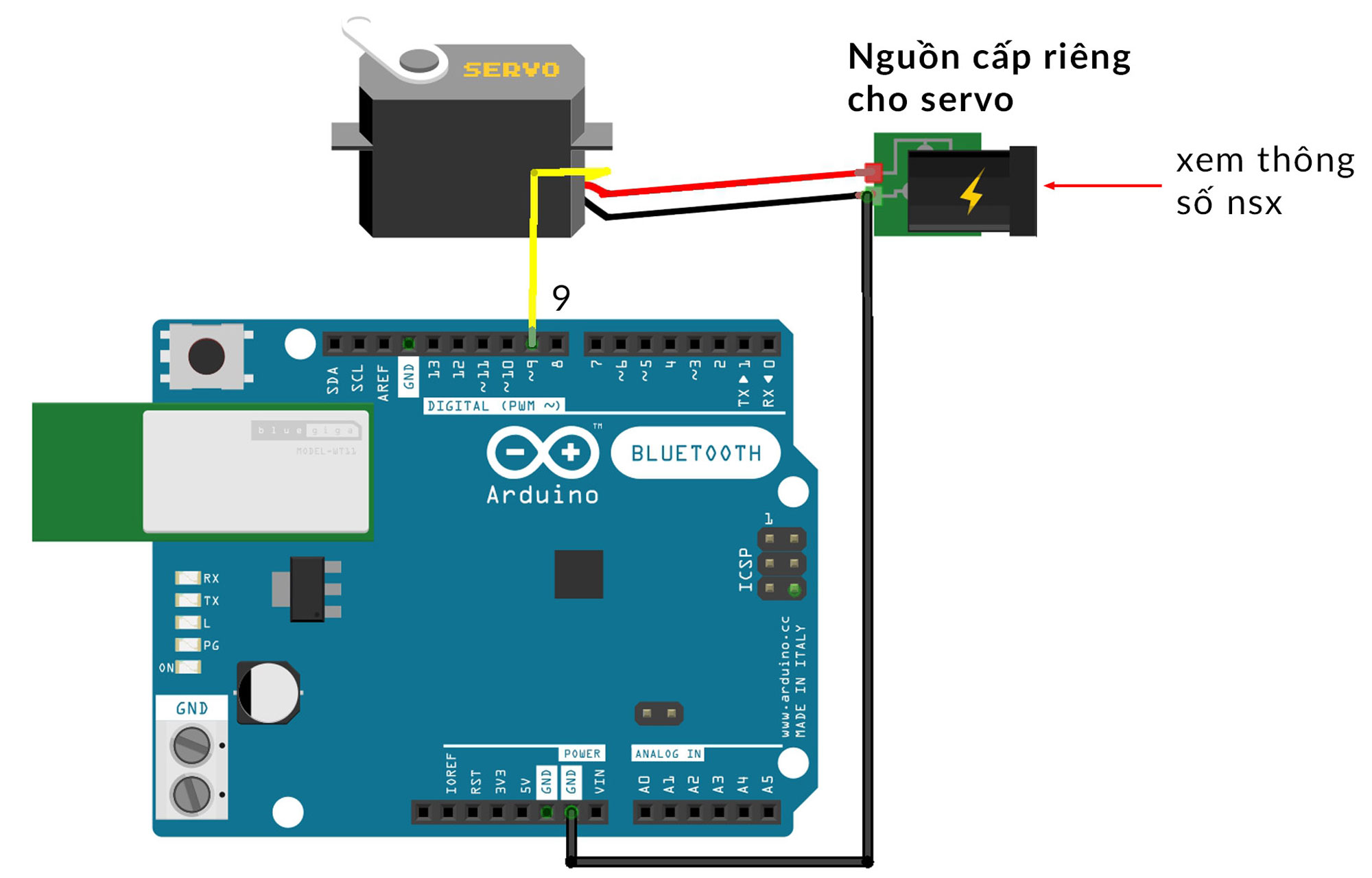 Sơ đồ kết nồi Servo MG90S (Bánh răng kim loại)
Sơ đồ kết nồi Servo MG90S (Bánh răng kim loại)
Code test MG90S with arduino UNO:
unsigned int Gia_tri_moi;
void setup()
{
TCCR1A = 0;
TCCR1B = 0;
// RESET lại 2 thanh ghi
DDRB |= (1 << PB1);
// Đầu ra PB1 là OUTPUT ( pin 9)
TCCR1A |= (1 << WGM11);
TCCR1B |= (1 << WGM12) | (1 << WGM13);
// chọn Fast PWM, chế độ chọn TOP_value tự do ICR1
TCCR1A |= (1 << COM1A1);
// So sánh thường( none-inverting)
TCCR1B |= (1 << CS11);
// P_clock=16mhz/8=2mhz
// mỗi P_clock bằng 1/2mhz= 0.5 us
OCR1A = 1060;
Gia_tri_moi = OCR1A;
// Value=1060 , tương đương xung có độ rộng 1060*0.5us=530us (0.53ms)
// Value=4820, tương đương xung có độ rộng 4820*0.5us=2410us (2,41ms)
ICR1 = 40000;
// xung răng cưa tràn sau 40000 P_clock, tương đương (20ms)
}
void set(unsigned int x)
{
if (Gia_tri_moi != x) {
OCR1A = x;
Gia_tri_moi = OCR1A;
}
else {
return; // thoát ngay
}
// x : 1060 - 4820
//Độ rộng: 0.53ms - 2.41 ms
}
void loop()
{
set(1060); // 0 độ
delay(1000);
set(4820); // 180 độ
delay(1000);
}
Sản phẩm tương tự







